转子的动平衡技术有哪些(转子的动平衡技术包括)
导语:转子的动平衡技术
1 不平衡的表示方法
我们把改变不平衡旋转体的质量分布来消除旋转轴周围的离心力作用,使转子达到运转平稳的这个过程称为“平衡”。
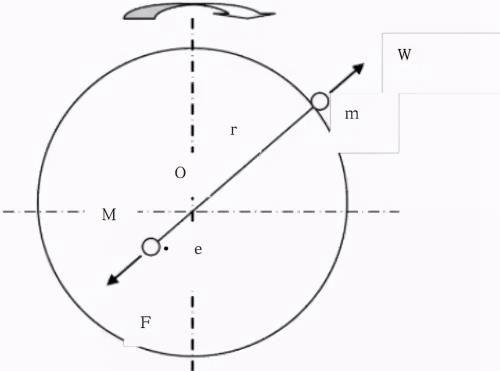
图1 动平衡试验示意图
如上图1所示,有一总质量为M 的圆盘,其重心和旋转中心的距离(偏心距)为e,原始不平衡产生的离心力为F。
如在相反方向上半径为r 处加一平衡质量m,它所产生的离心力为W,假如F=W,则转子达到完全平衡,即:

在实际平衡试验过程中,达到转子完全平衡是不可能的。因此经过动平衡后,各种转子的允许残余不平衡量怎样要求,也就是确定平衡精度等级的依据是什么。
从统计来求故障的实际经验中表明,对于同类型的转子(即几何相似的转子),允许的剩余不平衡度e 与转速ω 成反比,这种关系可以表示为

式中,e 为转子质量重心和旋转中心的偏心距,单位mm;ω 为转子的旋转角速度,单位1/s;G 为转子的平衡精度等级,单位mm/s。
上式中的G 从物理概念上理解,是转子质量中心的线速度。很明显,如果转子质量重心线速度越大,则转子的振动也就越激烈;转子质量重心线速度越小,则转子旋转也就越平稳。
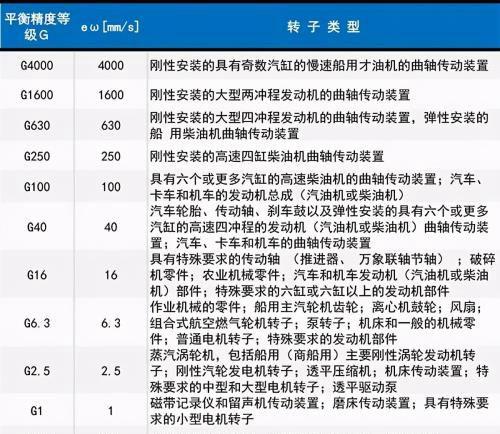
表1 各类刚性转子的平衡精度等级
国际标准化组织所制定的“刚性转子平衡精度”标准ISO1940,就是以G 值来划分精度等级的,G 值范围从0.16到4000mm/s,共分成11个等级,每个等级彼此按2.5倍分隔,例如:G 值范围从0.16~0.4mm/s,记为G 0.4;G 值范围从0.4~1mm/s,记为G1,其余类推。
上表给出了各种类型刚性转子的平衡精度等级,可供确定转子允许残余不平衡度时使用。
如果确定了转子的平衡精度等级,即给定了G 值之后,已知工作转速ω,就可以计算出转子的允许不平衡度e。对于给定质量M 的转子,则可计算出允许的不平衡量(不平衡力矩)。
2 刚性转子平衡
从转子平衡观点看,工作中的转子可分为刚性转子和挠性转子两类。
转子在较低转速下运转时(一般认为工作转速低于其一阶临界转速的0.5倍),由于离心力产生的转子动挠度变形很小,可以忽略不计,转子可以看作不发生变形的“刚体”,这种转子称为刚性转子。
但在高转速时(工作转速超过一阶临界转速的0.7倍),由于分布在轴向不同位置上的不平衡离心力作用,转子产生很大的挠曲变形,轴向弯矩增大,轴承振动也随之增大,这种转子就不能视为“刚体”,称为挠性转子。
大部分刚性转子按照其厚度不同、结构形式和平衡工艺的要求不同,分为静平衡和动平衡两种方法。静不平衡的转子所产生的不平衡作用力是在重心所在的径向平面上,可以经过动平衡或单纯做静平衡实验加以消除。
最简单的静平衡试验方法,是把转子轴径置于两根摩檫系数很小的水平导轨上滚动,利用转子上的重的部分处于最低位置时滚动便停止的原理,在相反的方向上配置适当平衡块,使转子在任何位置均不发生自由滚动,就达到了平衡目的。
滚动法不能直接测出静不平衡量,因此测量工作效率低。静平衡的另一种形式是天平法,它是利用转子重心对刃形支撑、扭形支撑或弹簧支点形成偏心的原理,产生力矩使框架倾斜,此时调整平衡砣使框架回到水平位置上,从而由平衡砣的移动量可求出静不平衡量。
静不平衡的校正通常适用于下列情况的转子:
① 转子的形状为薄圆盘,例如单级泵叶轮、风扇叶片、飞轮、皮带轮等,这类转子的回转体件的外径D 与长度I 之比满足D/I ≥5,此时,认为偶不平衡很小,所以实用上只须做静平衡试验。
② 对于大型减速齿轮等焊接结构转子的不平衡量很大,突然旋转转子有危险,在做动平衡前需要预先消除静不平衡。
③ 对于已经成型的砂轮等不易进行动平衡的转子,或者由于制造上受转子结构限制而无法进行动平衡的转子,一定要预先消除静不平衡。
静平衡的校正平面位置最好通过转子的质心,否则校正质量与转子的初始不平衡会形成偶不平衡, 转子旋转时将对轴承产生动反力。
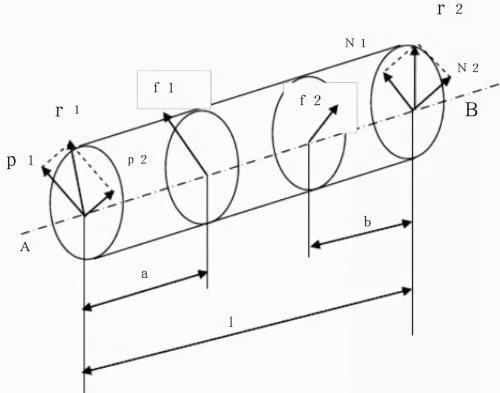
图2 宽度较大的刚性转子动平衡原理示意图
如图2所示,对于宽度较大的刚性转子,应采用动平衡方法来解决不平衡问题。
多数宽转子的不平衡状态是由静不平衡和偶不平衡两种基本类型叠加而成,叠加后的转子动不平衡,通常可以在两个任意选定的校正平面上(一般选在靠近两侧轴承处),用等效不平衡矢量来代替,然后在这两个平面上对其合力进行校正。
图2所示的刚性转子进行两个平面平衡的原理, 在两不平衡的薄圆盘上,其不平衡离心力为f1 和f2,力方向如图所示。
现选A、B两个面为校正平面。
由理论力学可知,一个力可以分解为与它相平行的两个分力。将f1 按力的简化法则分解为通过A、B两点的平行力P1 和N1,则

f2 将f2 按力的简化法则分解为通过A、B两点的平行力P2 和N2,则

将A 平面内的分力P1 和P2 合成为力r1,将B 平面内的分力N1 和N2 合成为力r2。r1 和r2 对于刚性转子是等价于f1 和f2 的,因此在r1 和r2 的作用点上加上大小相等、方向相反的力即可将转子平衡。
按照这个方法, 可将任何一个不平衡的刚性转子, 通过两个与转子轴线相垂直的平面进行校正而得到平衡, 这就是刚性转子的两面平衡原理。普通低速动平衡机,就是根据两面平衡的原理进行平衡的。
在采用平衡精度等级推荐数值时,应注意下列不同的情况:
① 对于静不平衡的回转体,许用不平衡量取由表中计算出的值。
② 对于动不平衡的回转体,由表中求出许用偏心距e,并根据mr=Me 求出许用不平衡重径积后,应将它分配到两个平衡基面上。一般情况下,将其平分为两部分,分别作为两平衡基面上的许用不平衡重径积就可以了。
当两平衡基面对零件的重心并不对称时(如图3所示),则两平衡基面上的许用不平衡重径积可按下式求得:


式中,a 和b 分别为平衡基面1及1至零件重心的距离。
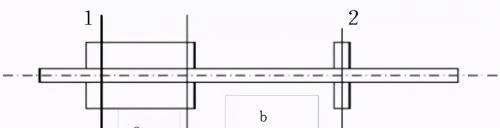
图3 两平衡基面对零件的重心并不对称平衡重径积
3 挠性转子平衡
由于挠性转子的工作转速超过转子的一阶临界转速,这时转子因挠曲变形而产生的质心偏移将增大离心力的作用,而且挠曲变形又是随着转速的变化而变化的,因此它的平衡原理不同于刚性转子。
挠性转子由不平衡力引起振动时,在不同转速下有其不同的型。无阻尼的转子轴承系统各阶振型基本上是一条绕转子轴线旋转平面曲线,但是有阻尼的转子轴承系统,振型曲线将是一条绕转子轴线旋转的空间曲线,当转速恒定不变时,该空间曲线形状也不变,转速变化,动挠度曲线也跟随变化。
为使一根挠性转子达到理想的平衡状态,必须保证转子的每阶振型都得到平衡,即在各种振型下达到轴或轴承座的动载荷为零,转子本身的动挠曲变形也为零。
另外要求在高速下平衡转子时所施加的校正量,应不破坏低速下的刚性转子平衡以及低阶振型平衡。
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请与我联系,一经查实立刻删除内容。本文内容由快快网络小茹创作整理编辑!