焊缝激光在线检测真的太直观了吗(焊缝激光在线检测真的太直观了怎么办)
导语:焊缝激光在线检测真的太直观了
利用激光位移传感器进行焊接后的焊道外观形状(咬边、搭叠、余高不够等表面缺陷)
1、激光焊道的2D截面形状检测
在焊接的后续工序中,目视进行全数检测时,不仅非常费时,同时也很难确保技能出众且有经验的检测员,可能会遗漏一些细微缺陷,出现人为失误,这是一个非常严峻的问题。此外,在使用视觉系统或传统红色激光位移传感器进行的焊接检测中,会因焊接焊炬的光或工件的漫反射光而发生误检测。
利用激光视觉传感器进行高速且稳定的截面形状检测例如,在拼焊(TB)的激光焊接工序中导入激光视觉传感器,可在不增加单件作业时间的前提下,追踪机器人的焊枪,在焊接后立即稳定地对焊道进行形状检测。即使在自动焊接时扫描头随焊枪快速并行移动,也可实现稳定的形状检测,可立即检测出焊接缺陷,将发生不良焊接的可能性降到最低。
不同采样速度下形状检测的比较
检测节距大,容易忽略突起部。
利用高速采样的细微节距,不放过突起部。
可指定16种测量内容和11种测量对象,共配备74种测量模式。利用丰富的测量模式,可对各种工件的焊接部、焊接焊缝进行形状检测。
测量指定范围内的高度
根据指定条件,测量宽度和位置
测量所检测的直线角度和交点位置
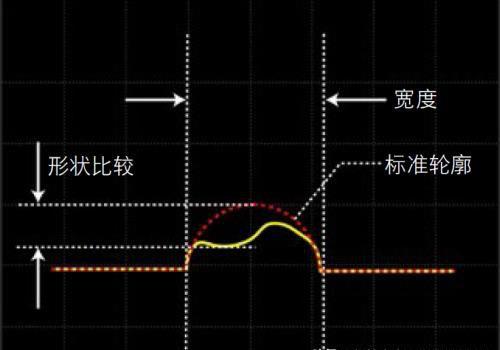
与注册的标准轮廓相比,测量高度差最大的部分
测量参考点与测量点的高度差
测量距参考面的截面面积
测量2点间的距离
测量曲线形状的半径或指定点的中心位置坐标
2、焊道的3D形状检测
在3D形状检测中,可对更多形状的焊接部进行检测,如仅凭2D截面形状数据无法检测出来的凹痕、咬边的容积、搭叠的体积、焊道表面的开裂、焊道弯曲(焊道歪斜、焊道错位)、焊道长度不良(坡口残留等)或电弧擦伤、溅射等。
利用视觉系统进行的3D形状检测利用超高速轮廓测量仪检测到的2D截面形状数据,生成3D形状并进行分析,实现精密的形状检测。
获取焊道的2D截面形状数据
通过视觉系统生成3D形状
对焊道的3D形状进行分析,检测各种不良
借助3D形状检测实现的焊接部形状检测示例
搭叠或余高不够、坡口残留、电弧擦伤、溅射的3D形状测量示例来源:基恩士宣传手册
本文内容由小珊整理编辑!