> 财经
工业机器人编程指令坐标系有哪些(工业机器人坐标系设置)
导语:工业机器人编程教程-坐标系统
在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
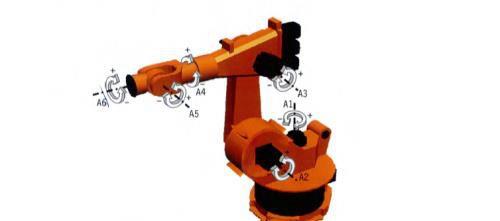
1、轴坐标系
(1)机器人每个轴均可以独立的正向或者反向移动。
(2)使用6D鼠标可以使轴运动。
2、世界坐标系
(1)世界坐标系是一个固定的直角坐标系,默认为世界坐标系位于机器人底部
(2)使用6D鼠标可以使轴运动。
()3)可以通过“mouse position”菜单调整鼠标的位置,使之与操作员操作位置相符,可以通过-/+软键改变位置,每次调整45°。
示意图一
示意图二
3、工具坐标系
工具坐标系是一个直接坐标系,原点位于工具上,请参考以下示意图:
4、基座坐标系
以目标工件货工作台为基准的直角坐标系。
5、坐标系的选择
坐标系可以根据机器人提供的人机对话控制面板进行选择:
本文内容由小茹整理编辑!