工业机器人的工具坐标用什么方法设定(工业机器人工具坐标标定)
导语:工业机器人的工具坐标系要怎么设定
引言:工业机器人的坐标系是为了确定机器人的位姿,而在机器人本身或者其它空间上设定的位姿指标系统。工业机器人的坐标系一般有大地坐标系、机座坐标系、工件坐标系以及工具坐标系等,那么,其中的工具坐标系会是什么呢?本文将以工业机器人的工具坐标系来进行相关内容的介绍。
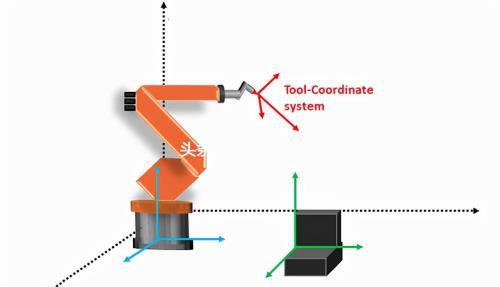
工具坐标系是由安装在工业机器人末端执行工具的中心点和坐标轴方位所构成的,通常会根据工业机器人所装置执行工具的变化而变化,原点与方向都是随着工业机器人末端执行工具位置与角度来不断变化。事实上,这个坐标系是由机座坐标系通过旋转和位移变化而来的。
为什么要设定工具坐标点呢?在示教点位的时候,我们可以通过重定位旋转让工业机器人绕着所定义的位置作空间旋转,从而方便的把工业机器人调整到我们所需要的姿态。在更换工具的时候,只需要更新工具坐标点,就可以不必重新示教工业机器人的轨迹,从而方便实现轨迹的纠正。
工业机器人的工具坐标系
工业机器人工具坐标系的设定方法
1、直接输入设定方法
如发那科机器人,第一步:切换到坐标系号需要设定的“方法”选择界面,具体操作如下:菜单→设置→类型→坐标系→F3坐标→工具坐标→选择要设定的坐标系号→F2详细→F2方法,然后进入“方法”的选择界面。第二步:选择工具坐标系的设定方法,在“方法”的选择界面中,选择直接输入法→回车确认,进入“直接输入法”的界面。第三步:修改参数,在“直接输入法”的界面中,选择并修改要设定的参数→回车确认。
2、三点设定方法
如发那科机器人,第一步:切换到坐标系号需要设定的“方法”选择界面,这个操作与直接输入设定方法相同。第二步:选择工具坐标系的设定方法,在“方法”的选择界面中,选择三点法→回车确认,进入“三点法”的界面。第三步:记录接近点,在工业机器人的附近位置找到一个固定的尖端点作为基准点,然后在末端执行器上确定一个参考点。
3、四点设定方法
工具坐标系的设定方法往往都会是四点法,不一样的品牌其方法也会有所不同。在工业机器人的附近位置找一点,使工具中心点对准这个参考点的位置,保持工具中心点的位置,变换末端执行器的姿态,一共需要记录四次,便可以自动生成工具坐标系的参数。工具坐标系设定时,首先要通过四点法进行设定末端执行器的姿态,此设定仅仅设定了末端执行器姿态的一点,工具坐标系中的姿态设定进一步设定了工具坐标系的X轴、Y轴、Z轴的方向,使得工业机器人可以沿着工具坐标系进行移动。
工业机器人的工具坐标系
4、六点设定方法
六点法是以三点法为基础进行设定的,只是第四点也被叫做坐标原点,是让末端执行器的参考点垂直与基准点;第五点是末端执行器的参考点从坐标原点往将要设定工具中心点的X轴方向移动;第六点是末端执行器的参考点从坐标原点往将要设定工具中心点的Z轴方向移动。这样工业机器人可以通过这六个位置点的数据自动计算出新的工具坐标系的参数。
浏览以上文章可以了解到工业机器人工具坐标系的设定方法有直接输入法、三点法、四点法、六点法等,不一样的品牌其设定方法也会有所不同。工业机器人在使用之前,首先需要根据末端执行器的类型,以选择合适的设定方法,正确地利用示教器进行示教,从而建立新的工具坐标系,为工业机器人准确的运动控制打下了基础。请关注捷众机器人,了解更多有关工业机器人的知识与应用。
本文内容由快快网络小珊创作整理编辑!