工业相机概述图(工业相机简介)
导语:工业相机概述
工业相机是机器视觉系统中最关键的组件之一,其将光信号转变为有序的电信号,可按照数据传送方式分为ccd/cmos,也可按结构特性分为线阵/面阵等;选型时主要取决于使用场景、分辨率、帧率等因素,结合像元大小、靶面尺寸等参数完成,是影响图像质量最直接的因素。
一、芯片类型
一般来说,工业相机可按照芯片类型分为CCD和CMOS两种,这里我们分别展开介绍。
1CCD
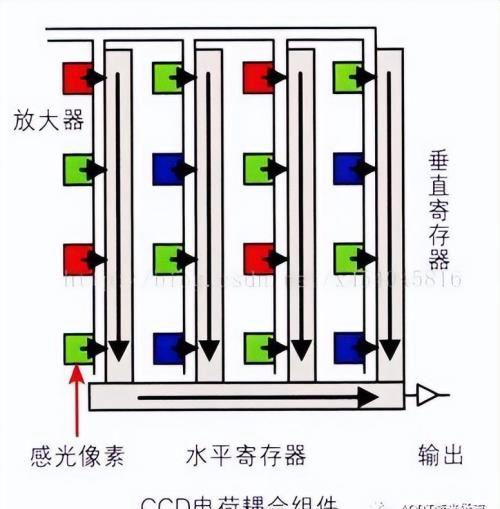
在感光元件受到光照后,将光信号转化为电信号,产生大小与光强相对应的电流(模拟信号)。在CCD传感器中,每一个感光元件都不对此作进一步的处理,而是将它直接输出到垂直寄存器,传到水平寄存器中,最后经一个放大器放大后统一输出(由于感光元件生成的电信号实在太微弱且存在电压损耗,无法直接进行模数转换工作,因此这些输出数据必须做统一的放大处理—这项任务是由CCD传感器中的放大器专门负责)。经放大器处理之后,每个像点的电信号强度都获得同样幅度的增大(因信号均通过一个放大器进行放大,所以产生的噪点较少)。后通过模数转换芯片转为数字信号,最终以二进制数字图像矩阵的形式输出给专门的DSP处理芯片。
2CMOS
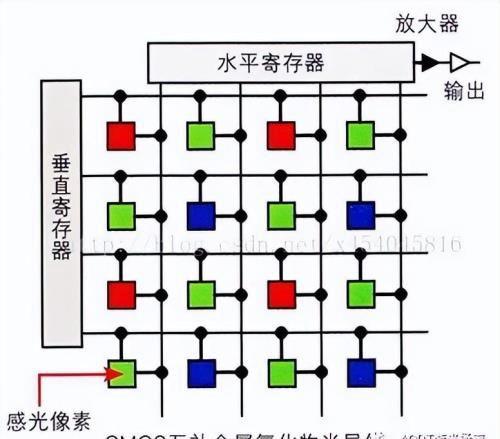
相对于CCD的工作方式,CMOS传感器中每一个感光元件都直接整合了放大器和模数转换逻辑,当感光二极管接受光照、产生模拟的电信号之后,电信号首先被该感光元件中的放大器放大,然后直接转换成对应的数字信号。换句话说,在CMOS传感器中,每一个感光元件都可产生最终的数字输出,所得数字信号合并之后被直接送交DSP芯片处理。由于放大器属于模拟器件,因此很难保证每个像点的放大率都保持严格一致,导致放大后的图像数据无法代表拍摄物体的原貌体现在最终的输出结果上,使得品质明显低于CCD传感器,不过目前这方面的技术已大幅改善。
二. 结构类型
面阵相机。视觉系统中普遍提及的多为面阵相机,其传感器包含多行感光元素,常用尺寸有1、2/3、1/2、1/3英寸等,单帧图像即可获取完整二维信息。
线阵相机。与面阵相机相比,线阵相机通常仅有一行感光元素(灰度),因此通常具有更高的扫描频率和分辨率。常用于检测连续的材料,如布料、滚筒等。被测物通常匀速运动(或速度可测), 利用一台或多台相机对其逐行连续扫描,以达到对其整个表面均匀检测的目的。相较于面阵相机,线阵相机分辨率更高,在部分工业产线、高反场景更为适用,但需结合对应转台/传送带、线光源等。
三、关键参数
1 分辨率(Resolution)
相机每次采集图像的像素点数(Pixels),对于工业数字相机一般是近似与光电传感器的有效像素数(像素总数中被用来进行有效的光电转换并输出图像信号的像素)对应,分辨率越高,图像越清晰,细节还原越好。
2 像素深度(Pixel Depth)
即每像素数据的位数,以灰度相机为例,常用8bit(255灰度级),目前最高支持到16bit(65535灰度级),细节更为丰富。
可通过分辨率、像素深度等参数大概计算出单帧图像大小。
3 最大帧率(Frame Rate)/行频(Line Rate)
相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),而对于线阵相机为每秒采集的行数(Hz)。
4 曝光方式(Exposure)和快门速度(Shutter)
对于工业线阵相机都是逐行曝光的方式,可以选择固定行频和外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间;面阵相机有全局曝光和卷帘曝光等几种常见方式,全局曝光通常不会存在拖影等问题。曝光时间最短可到ns级。同时,曝光时间可直接影响到帧率等问题,通常情况下当曝光时间超过一定阈值时,将会导致相机帧率的大幅下降,具体原因后续将会展开介绍。

5 像元尺寸(Pixel Size)
像元大小和像元数(分辨率)共同决定了相机靶面的大小。目前工业数字相机像元尺寸一般为3μm-10μm,一般像元尺寸越小,制造难度越大,图像质量也越不容易提高。
6 光谱响应特性(Spectral Range)
是指该像元传感器对不同光波的敏感特性,一般响应范围是350nm-1000nm,多数对近红外敏感,因此在某些场景可以补近红外光源突出关键处图像效果。
以上就是针对2D工业相机的简单概述,后续将会继续针对相机选型、参数细节、应用场景及实例展开介绍。
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请与我联系,一经查实立刻删除内容。本文内容由快快网络小春创作整理编辑!