发那科机器人运动指令四要素(发那科机器人如何手动运动)
导语:发那科机器人应用-运动类型
动作类型
动作类型有“ J ”(关节)、“ L ”(直线)、“ C ”(圆弧)、“ A ”( C 圆弧),可从中选择来操作机器人。
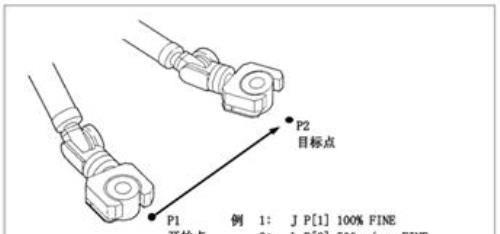
选定“ J ”(关节)时,定义:关节动作是指工
具在两个目标点之间的任意运动,不进行轨迹控制和姿势控制(速度最快、路径不可知)。MoveJ 指令常用于机器人在空间大范围移动,可用的速度单位有:%,sec,msec

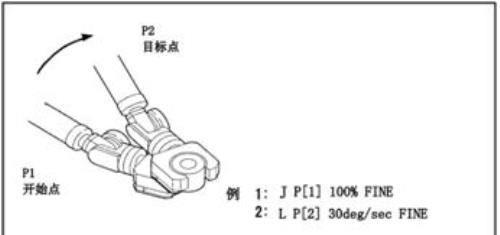
选定“ L ”(直线)时,是指工具在两个目标的点之间沿直线运动,从动作开始到结束点以线性的方式对TCP移动轨迹进行控制的一种移动方法。可用的速度单位有:mm/sec,cm/min,sec,msec
.2.2 直线动作(含旋转)
定义:旋转动作是指使用直线动作,使工具的姿势从开始点到结束点以刀尖点为中心旋转的移动移动方法。
可用的速度单位有:deg/sec
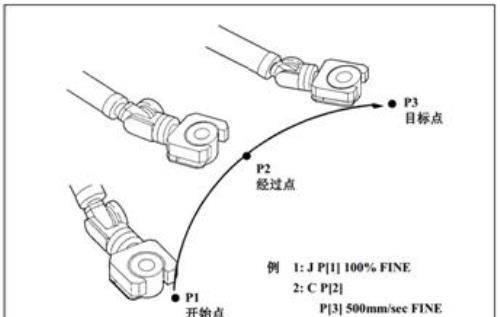
选定“ C ”、“ A ”(圆弧)时,工具中心点在 3 个示教点之间的圆弧上移动。
C圆弧动作是指工具在三个目标点之间沿圆弧运动,从动作开始点通过经由点到结束点以圆弧方式对刀尖点移动轨迹进行控制的一种移动方法。
可用的速度单位有:mm/sec,cm/min,sec,msec
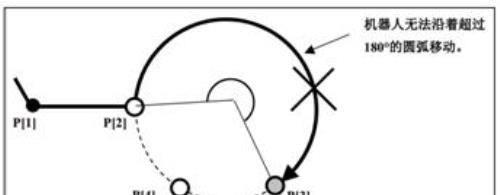
1.3.2 A圆弧动作
定义:C圆弧指令下,需要在一个指令中示教两个点位,即经过点和结束点,A圆弧动作指令下,在一个指令中只示教一个点位,再联结由连续的3个A圆弧动作指令生成圆弧。
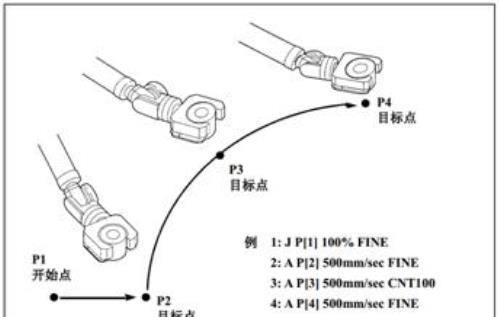
图6:A圆弧动作示意
注意:一段A圆弧指令(3个点)所形成的弧线圆弧角度不能超过180°
定位类型有两种:“ FINE ”(定位)和“ CNT (0-100)”(平顺)
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请与我联系,一经查实立刻删除内容。本文内容由快快网络小梓创作整理编辑!