基坑水平位移监测方法(基坑水平位移监测仪器)
导语:基坑水平位移监测
基坑监测中围护墙(边坡)顶部水平位移监测是所有监测基坑的必测项目,本文主要介绍水平位移监测的方法及位移量计算与精度评定。
1、外业水平位移监测水平位移监测最常用的方法是采用全站仪极坐标法、自由设站法。全站仪设站完成后先观测某一后视已知点再依次测量各监测点,最后再观测同一后视已知点。为消弱测量误差通常需要进行盘左盘右观测,根据盘左盘右观测的顺序不同有两种观测方法:一种是方向观测法,即先进行全部的盘左观测,再进行盘右观测;一种是依次对每点进行盘左盘右观测。
2、监测点坐标计算以上两种观测方法得到的观测量是相同的。包括:后视点两次方向观测值,(归零),各监测点的方向观测值、斜距、竖直角(计算时所有观测值均先取盘左盘右平均)。
为提高测点精度,通常会对测点的方向观测值进行改正。本文介绍两种改正方法:
式中为各监测点修正后的方位角,为后视点已知方位角,,,同前文。广州市建委基坑平台采用的第1种方法,广州交通监测平台采用第2种方法进行计算,两种方法计算结果有轻微差别。
改正后即可进行监测点坐标计算:
式中、为测站点坐标,角度计算时应转为弧度。
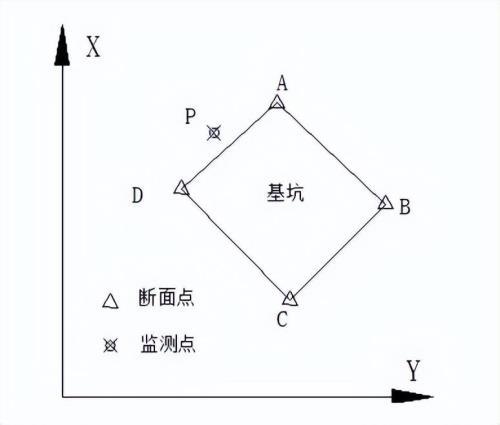
3、监测断面划分假定基坑如下图所示:A、B、C、D为基坑转角点,用于设置测点的虚拟断面。P点位监测点。各测点的虚拟断面根据需要选定,最终计算结果为测点在虚拟断面法线方向的位移。
基坑监测位移点计算示意图
图P点的虚拟断面D-A可用以下直线方程表示。
4、点到虚拟断面距离及方向判断点到虚拟断面的距离可用下式计算。
若虚拟段面沿基坑顺时针方向设置:D<0,表示监测点在基坑范围(虚拟断面)外侧;D=0,表示监测点在虚拟断面上;D>0,表示监测点在基坑范围(虚拟断面)内侧。若虚拟断面沿基坑逆时针方向设置则与顺时针方向设置时相反。
5、测点位移量计算根据测点到虚拟断面距离的变化即可求出测点的位移,,为正表示朝点基坑方向移动(人为规定)。
6、测点精度评定点P的点位中误差计算公式为,式中。
设全站仪的标称精度为测角0.5″,测距0.6mm+1ppm,测点至测站距离为150m,后视点B的方位角误差为0。
则,, 代入得。上面计算为1测回的精度,当测回数为n时,距离及角度应先取平均值,则测角精度,测距精度也相同。
本文内容由快快网络小馨整理编辑!