> 科技
工业机器人多少钱一个(工业机器人后悔)
导语:工业机器人十万个怎么办-不清楚机器人工件坐标系标定怎么办?
机器人工件坐标系是由工件原点与坐标方位组成。
机器人程序支持多个 Wobj,可以根据当前工作状态进行变换。
外部夹具被更换,重新定义 Wobj 后,可以不更改程序,直接运行。
通过重新定义 Wobj,可以简便的完成一个程序适合多台机器人。
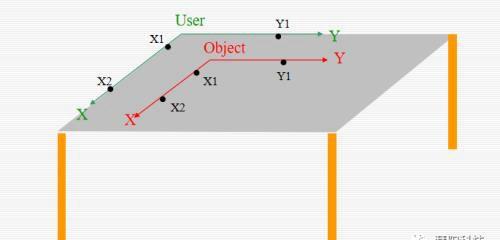
定义工件坐标系的方法
三点法-点 X1 与 点 X2 连线组成 X 轴,通过点 Y1 向 X 轴作的垂直线,为 Y 轴。
定义工件坐标系步骤
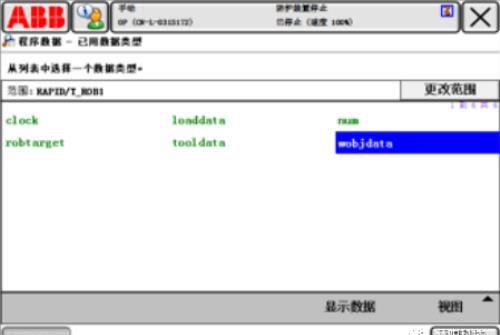
1.点击ABB菜单,点击“程序数据”,进入程序数据窗口
2.在程序数据窗口中选择“wobjdata”,进入工件数据窗口
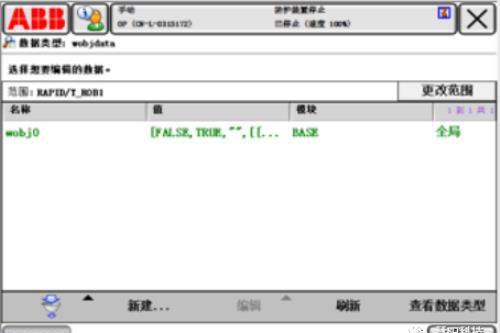
3.在打开的工件数据窗口中,点击“新建”,新建一个wobjdata
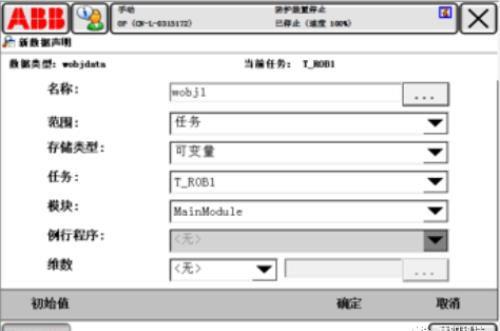
4.根据需要更改名称,然后点击“确定”
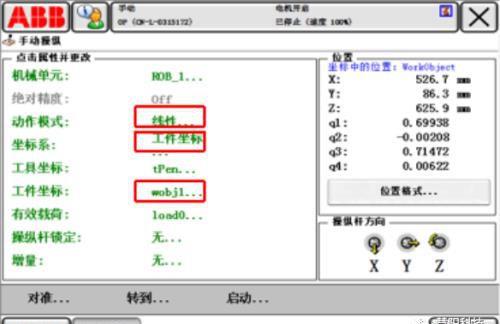
5.打开手动操纵窗口,选择当前使用的坐标为“工具坐标”

6.切回到“程序数据”窗口,选择新定义的wobjdata后,在功能键上选择“编辑”,在弹出菜单中选择“定义”

7.点击下拉菜单,选择定义方法,此处应用默认的三点法
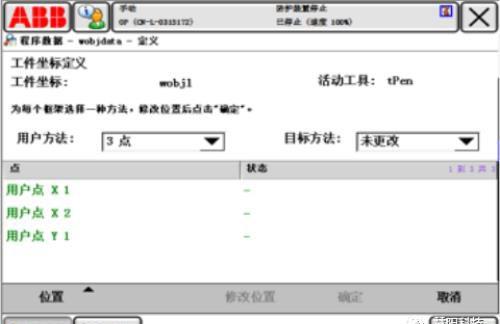
8.手动操纵机器人,使TCP点与点X1相碰,使用功能键“修改位置”记录机器人相应位置
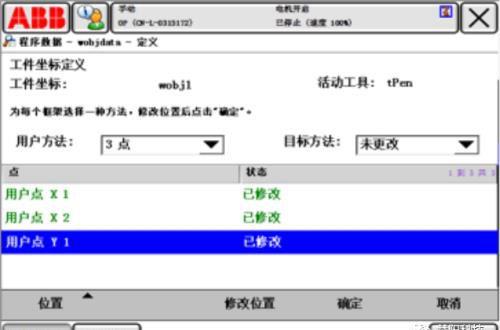
9.重复步骤8使TCP点分别与点X2、点Y1相碰,并使用功能键“修改位置”记录机器人相应位置。最后用“确定”键确认
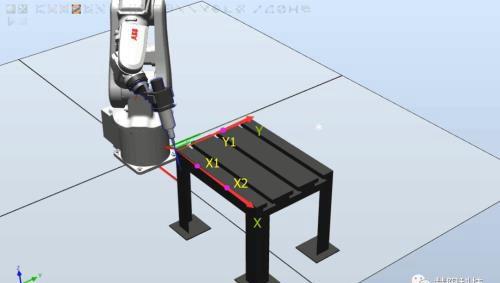
10.手动移动机器人,使用“线性运动”模式,按照新定义的工件坐标(wobj1)运动,进行验证。(若线性运动路径与工件轮廓线方向一致则工件坐标标定成功)
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请反馈,一经查实立刻删除内容。本文内容由快快网络小若创作整理编辑!