空三加密是什么(ipho空三加密)
导语:原来,“空三加密”竟是加了这些“密”
解析空中三角测量(摄影测量加密)
解析空中三角测量:指的是用摄影测量解析法确定区域内所有影像的外方位元素。
在传统摄影测量中,这是通过对点位进行测定来实现的,即根据影像上量测的像点坐标及少量控制点的大地坐标,求出未知点的大地坐标,使得已知点增加到每个模型中不少于四个,然后利用这些已知点求解影像的外方位元素,因而解析空中三角测量也称摄影测量加密。
解析空中三角的目的和意义
在测绘学历史中,采用大地测量测定地面点三维坐标的方法拥有着悠久的历史与深远的影响,直至今日仍拥有着十分重要的地位。
随着摄影测量与遥感技术的发展和电子计算机技术的进步,摄影测量方法进行点位测定的精度得到了大幅提升,使其在不同领域得到了广泛应用。
摄影测量方法测定(加密)点位坐标的意义在于:

(1)不需直接触及被量测的目标或物体,凡是在影像上可以看到的目标,不受地面通视条件限制,均可以测定其位置和几何形状;
(2) 可以快速地在大范围内同时进行点位测定,从而可节省大量的野外测量工作量;
(3) 摄影测量平差计算时,加密区域内部精度均句,且很少受区域大小的影响;
解析空中三角测量的分类
利用电子计算机进行解析空中三角测量可以采用各种不同的方法。从传统方法上讲,根据平差中采用的数学模型可分为航带法、独立模型法和光束法。
航带法是通过相对定向和模型连接先建立自由航带,以点在该航带中的摄影测量坐标为观测值,通过非线性多项式中变换参数的确定,使自由网纳入所要求的地面坐标系,并使公共点上不符值的平方和为最小。
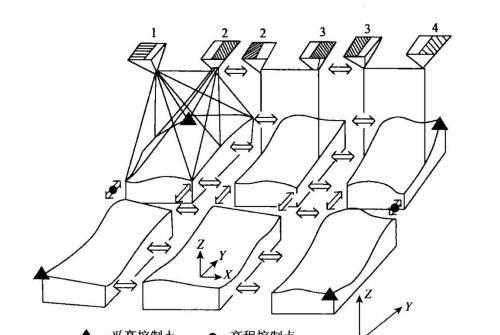
独立模型法平差是先通过相对定向建立起单元模型,以模型点坐标为观测值,通过单元模型在空间的相似变换,使之纳入到规定的地面坐标系,并使模型连接点上残差的平方和为最小。
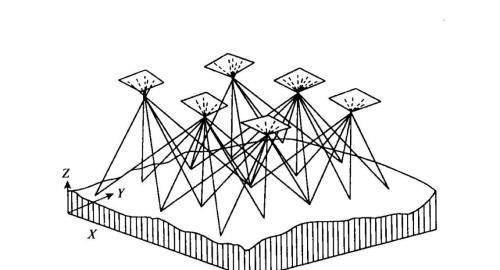
而光束法则直接由每幅影像的光线束出发,以像点坐标为观测值,通过每个光束在三维空间的平移和旋转,使同名光线在物方最佳地交会在一起,并使之纳人规定的坐标系,从而加密出待求点的物方坐标和影像的方位元素。
进行解析空中三角测量所必须的信息
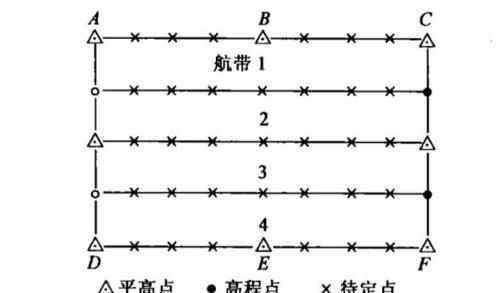
解析空中三角测量不仅要利用所摄目标地区的影像所提供的摄影测量信息,还要利用确定平差基准(即网的绝对位置)的非摄影测量信息,从而测定所摄影像的方位元素或未知点的物方空间坐标。由于它不同于大地测量中的三角测量控制网,而是要将空中摄站及影像放到加密的整个网中,起到点的传递和构网的作用,故通常被称为空中三角测量。
摄影测量信息,主要指在影像上量测的控制点、定向点、连接点及待求点的影像坐标,或在所建立的立体模型上量测的上述各类点的模型坐标。由于地面点可出现在多幅影像或多个模型中,所以,在量测这些坐标时,存在点在影像和模型上的辨认问题。但是,这些坐标的获得与点在地面上是否通视无关,只要它们出现在影像上即可。
非摄影测量信息,主要指将空中三角测量网纳入到规定物方坐标系所必须的基准信息。同时还要考虑到不同方法求解时的几何可测定性和对影像系统误差的有效改正。

长期以来,人们主要是利用若干已知大地测量坐标的物方控制点作为平差的基准信息。然而从摄影测量观测值与非摄影测量观测值的联合平差意义上讲,非摄影测量信息中还包括了直接的大地测量观测值、导航数据所提供的影像外方位元素以及物方点之间存在的相对控制条件等信息。
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请反馈,一经查实立刻删除内容。本文内容由快快网络小涵创作整理编辑!