> 科技
从相位变化的角度理解小相位系统的特点(从相位变化的角度理解小相位系统的含义)
导语:从相位变化的角度理解最小相位系统
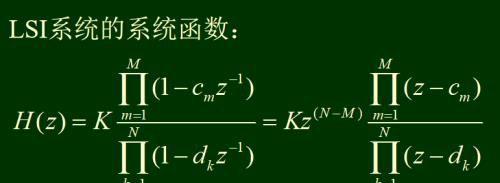
图a
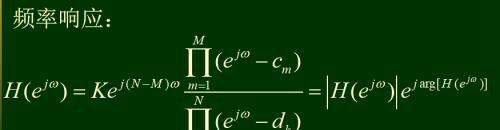
图b
前面这几步都好理解。

图1

图2

图3
图1到图3是说,当w从0变到2pi时,单位圆内的零点或者极点向量都会变化2pi。
图1中,假设单位圆内的红圈点是一个零点,那么,由这个零点指向实轴Re[Z]的那个矢量就是一个零矢量
。这个零矢量绕单位圆旋转一周,其角度变化确实是2pi,因为仅仅考虑旋转角度的时候,矢量都可以平移,我们可以假设把刚才的那个零点移到原点,从而零矢量也平移到相应位置,再绕单位圆旋转一周,那么,其旋转的角度确实是2pi。
再考虑图1中单位圆外的那个零点,同样这个零点指向实轴Re[Z]的那个矢量就是一个零矢量。那为什么这个零矢量绕单位圆一周其变化的角度是0呢?还是可以从矢量平移的角度出发来考虑。我们可以假设把坐标的原点平移到单位圆外的那个零点处,但单位圆的位置不变,以保证这个零点处于单位圆外。这时候我们就可以看到,这个零矢量绕单位圆旋转一周后,其围绕原点旋转的角度确实是0。
上述结论同样适用于极点。
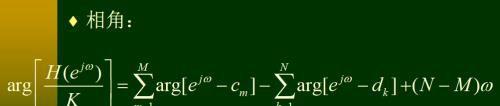
有了上述结论以后,再在相角的表达式中,
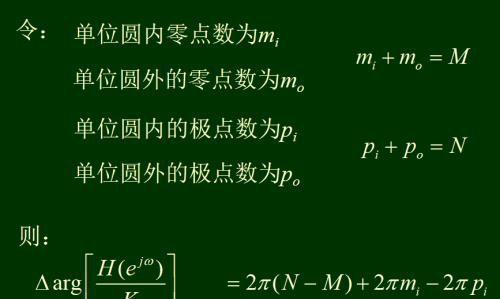
上面推论表明,图a中的系统函数,在w从0变到2pi的过程中,其旋转的角度与零极点的数目,以及在单位圆的外面还是里面是相关的。所以对于
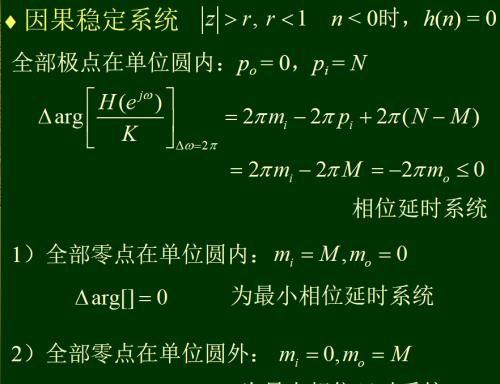
从上面分析可以得出结论:
1:当全部零点和极点都在单位圆内的时候,系统函数的变化角度是0,这也是最小相位系统名称的由来。
2:当全部零点在单位圆外,而全部极点在单位圆内的时候(因果稳定系统),则称为最大相位系统。
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请反馈,一经查实立刻删除内容。本文内容由快快网络小珊创作整理编辑!