> 健康
机械手上的气缸组成(机械手上的气缸组件有哪些)
导语:机械手上的气缸组
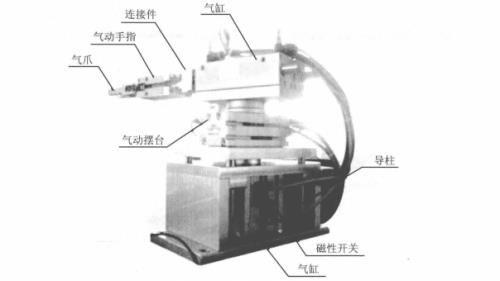
抓取机械手装置是一个能实现升降、伸缩、气动手指夹紧/松开和沿垂直轴旋转的四维自由度运动的工作单元,该装置整体安装在步进电机传动组件的滑动板上,在传动组件带动下整体做直线往复运动,定位到其他各工作单元的物料台,然后完成抓取和放下工件的功能。该装置如下图所示:
机械手上多种气缸共同运作
装置的具体构成如下:
1.气动手爪:双作用气缸由一个二位五通双向电磁阀控制,带状态保持功能,用于各个工作站抓取搬运。双向电磁阀工作原理类似双稳态触发器,即输出状态由输入状态决定,如果输出状态确认了,即使无输入状态,双向电磁阀同样可保持被触发前的状态。
2.双杠气缸:双作用气缸由一个二位五通单向电磁阀控制,用于控制手爪伸出缩回。
3.旋转气缸:双作用气缸由一个二位五通单向电磁阀控制,用于控制手臂正反向 90°旋转,气缸旋转角度可以任意调节范围0~180°,调节通过节流阀下方两颗固定缓冲器进行调整。
4.提升气缸:双作用气缸由一个二位五通单向电磁阀控制,用于整个机械手提升下降。
以上气缸运行速度快慢由进气口节流阀调整进气量进行速度调节。
本文内容由小萱整理编辑!