> 健康
工业机器人工具测量方法有哪些(工业机器人测量工具的使用)
导语:工业机器人工具测量
上一章我们介绍了《工业机器人机器人上的负载》,这一章我们介绍《工业机器人工具测量》
一、测量工具说明:
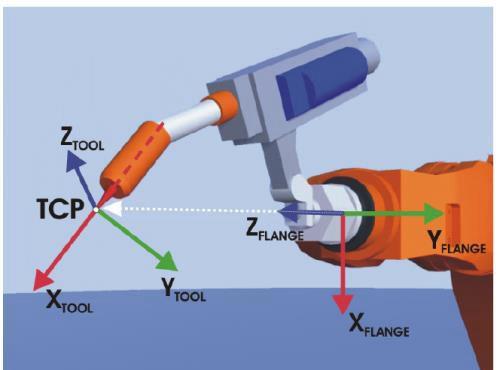
测量工具意味着生成一个以工具参照点为原点的坐标系。 该参照点被称为 TCP(Tool Center Point,即工具中心点),该坐标系即为工具坐标系。因此,工具测量包括......
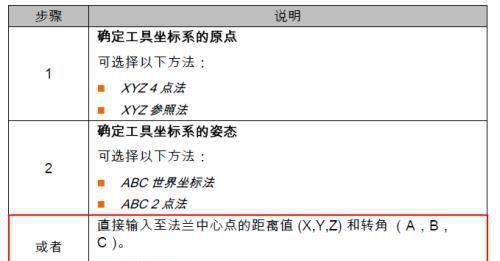
1、TCP (坐标系原点)的测量
2、坐标系姿态/ 朝向的测量
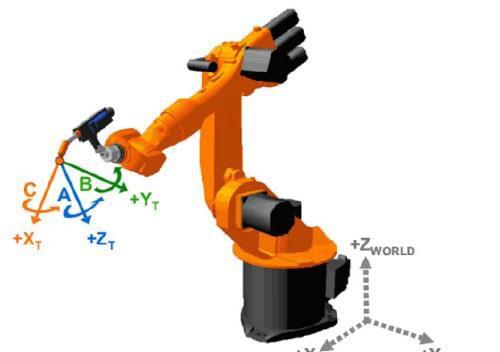
测量时,工具坐标系的原点到法兰坐标系的距离(用 X、Y 和 Z)以及之间的转角(用角度 A、B 和 C)被保存。
注意:最多可储存 16 个工具坐标系。 (变量:TOOL_DATA[1…16])!
二、工业机器人工具测量的优势
1、手动移动改善
(1)可围绕 TCP (例如:工具顶尖)改变姿态。
(2)沿工具作业方向移动

(3)运动编程时的益处,沿着 TCP 上的轨迹保持已编程的运行速度,此外,定义的姿态可沿着轨迹。

2、工具测量的途径
本章《工业机器人工具测量》就介绍到这,下一章我们介绍《工业机器人测量方法》,敬请期待!
免责声明:本站部份内容由优秀作者和原创用户编辑投稿,本站仅提供存储服务,不拥有所有权,不承担法律责任。若涉嫌侵权/违法的,请反馈,一经查实立刻删除内容。本文内容由快快网络小若创作整理编辑!